AI-Driven Photovoltaic Inspection Systems Using Multi-Modal Imaging

This research focuses on developing a comprehensive, real-world deploy-able inspection framework for photovoltaic (PV) systems using Artificial Intelligence and advanced imaging techniques. The work addresses key challenges in PV monitoring, including efficiency loss due to surface soiling and internal defects, under practical constraints such as low signal-to-noise ratio (SNR), varying environmental conditions, and domain shifts between laboratory and field data.
A multi-modal approach is adopted, combining UAV-based aerial RGB imaging for large-scale inspection with Electroluminescence (EL) imaging for detailed cell-level defect analysis. The system integrates hardware design, image acquisition, signal processing, and AI-based analysis into a unified pipeline, enabling scalable and intelligent monitoring of solar PV installations.
Solar photovoltaic systems are critical to global renewable energy infrastructure, yet maintaining their efficiency at scale remains a significant challenge. Performance degradation arises from multiple factors, primarily:
• Surface-level contamination (e.g., dust, bird droppings) affecting energy absorption
• Internal defects (e.g., cracks, hotspots, finger interruptions) reducing electrical output
Traditional inspection methods are either manual, costly, or fail to capture fine-grained defects under real-world conditions. Furthermore, imaging-based inspection faces additional challenges including:
• Low SNR in Electroluminescence imaging, especially under non-ideal conditions
• Domain shifts between laboratory datasets and field-acquired data
• Variability in lighting, sensor characteristics, and environmental conditions
• Detection of small-scale anomalies in large-area aerial imagery
This research addresses these limitations by developing robust, AI-driven inspection systems capable of operating under real-world constraints. To address the multi-scale nature of PV inspection, a unified multi-modal framework was developed, combining complementary sensing and analysis techniques:
• Aerial RGB Imaging (UAV-based): Enables large-scale inspection of PV installations for detecting surface-level soiling and contamination
• Electroluminescence (EL) Imaging: Provides high-resolution, cell-level insight into internal defects and structural degradation
These modalities are integrated within an AI-driven pipeline that performs detection, classification, and analysis across different spatial scales. The framework bridges the gap between rapid large-area inspection and detailed diagnostic analysis, enabling a complete understanding of PV system health.
Key Contributions
• Designed and developed a low-cost Electroluminescence (EL) imaging system for photovoltaic defect inspection under real-world conditions
• Developed a synchronized image acquisition and SNR-enhancement pipeline for improving EL image quality
• Proposed AI-based defect detection using transfer learning and unsupervised domain adaptation (MMD, FDA, attention mechanisms)
• Achieved strong cross-domain performance (F1 ~0.83, AUROC ~0.97) on EL defect classification tasks
• Developed SDS-YOLO, a lightweight deep learning model for UAV-based multi-class soiling detection
• Built and deployed a UAV inspection platform using PX4 with RF-resilient communication (TBS Crossfire) and sensor fusion
• Implemented end-to-end pipelines integrating hardware, signal processing, and AI for real-world PV inspection
• Demonstrated robustness of the system under varying environmental conditions, sensor differences, and operational constraints
Figure: Overview of the multi-modal PV inspection framework combining UAV-based aerial imaging and EL-based defect diagnostics integrated with AI analysis.
Large-Scale Inspection: UAV-Based Soiling Detection
Large-scale PV installations require efficient and scalable inspection methods to identify performance degradation caused by surface-level contamination such as dust accumulation and bird droppings. Manual inspection is impractical at scale, while traditional sensing approaches lack spatial coverage and resolution.
To address this, a UAV-based aerial inspection system was developed to enable rapid, non-contact monitoring of PV arrays. The system integrates custom drone hardware, aerial RGB imaging, and AI-based detection models to identify soiling patterns across large installations in real-world environments.
The UAV inspection pipeline consists of three primary components:
• Data Acquisition: A customized UAV platform captures high-resolution aerial RGB images of PV arrays under varying environmental conditions
• Data Processing: Images are preprocessed to account for perspective, illumination variation, and scale differences
• AI-Based Detection: A lightweight deep learning model (SDS-YOLO) detects and classifies multiple types of soiling, including dust and bird droppings
This pipeline enables efficient large-area inspection while maintaining sensitivity to small-scale contamination patterns.
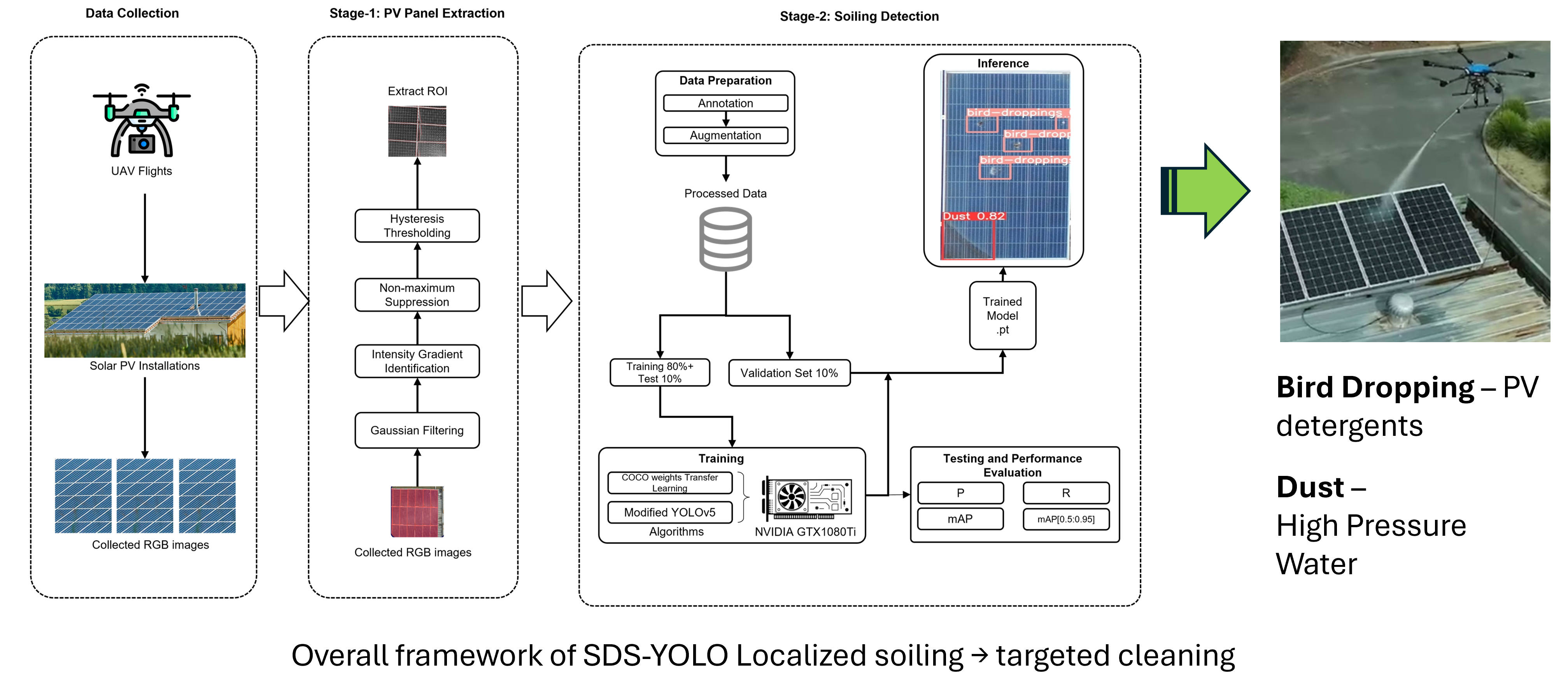
Above figure shows UAV-based PV inspection pipeline illustrating aerial data acquisition and AI-based soiling detection.
UAV Platform Design & Customization
A custom UAV platform was developed using a hexa-frame agricultural drone, modified for close-range inspection and operation in complex environments. The system was designed to operate reliably in RF-dense conditions and confined spaces commonly encountered in solar installations.
Key features include:
• PX4-based flight control system for flexible and stable operation
• TBS Crossfire communication system to mitigate interference from 4G/5G networks
• Integration of onboard sensors, including optical flow and stabilization sensors, for precise navigation
• Structural and electronic modifications to support low-altitude, high-precision inspection
These modifications enabled stable image acquisition and repeatable flight paths, which are critical for consistent data collection.
Figure: UAV platform development including sensor integration, hardware customization, and field tests.
Soiling Detection using SDS-YOLO
To detect and classify soiling in aerial imagery, a customized deep learning model, SDS-YOLO, was developed. The model is designed to address challenges specific to PV inspection, particularly the detection of small-scale anomalies such as bird droppings, which often occupy a very small portion of the panel surface.
Key characteristics of the model include:
• Lightweight architecture optimized for efficient inference
• Multi-class detection capability (e.g., dust, bird droppings)
• Enhanced sensitivity to small objects through customized anchors and detection heads
• Improved precision and recall compared to baseline object detection models
The model was trained on UAV-captured datasets and evaluated under real-world conditions, demonstrating strong performance in identifying soiling patterns across diverse scenarios.
Figure: SDS-YOLO detection results showing identification of dust and bird droppings in aerial PV imagery.
Video: Overview of the UAV-based soiling detection system and SDS-YOLO model.

The UAV-based inspection system addresses several critical challenges in real-world PV monitoring:
• Detection of small-scale anomalies in large-area imagery
• Variability in lighting, shadows, and environmental conditions
• Maintaining stable flight and image quality in RF-interference environments
• Ensuring scalability for large solar installations
By combining hardware customization with AI-based detection, the system provides a practical solution for large-scale PV inspection.
Cell-Level Inspection: Defect Detection using Electroluminescence (EL) Imaging
While aerial inspection enables large-scale monitoring of PV installations, it lacks the resolution required to identify internal cell-level defects. To address this limitation, Electroluminescence (EL) imaging is employed as a diagnostic tool for detecting structural and electrical defects within PV cells.
EL imaging captures radiative recombination phenomena in photovoltaic materials when forward-biased, revealing defects such as micro-cracks, inactive regions, and finger interruptions that are otherwise invisible in standard RGB imagery. However, deploying EL imaging outside controlled laboratory environments presents significant challenges, particularly due to low signal intensity and sensitivity to environmental conditions.
EL Imaging System Design
A low-cost EL imaging system was designed and developed to enable practical defect inspection under indoor conditions. The system integrates imaging hardware, controlled excitation, and synchronized acquisition to capture high-quality EL signals.
Key components of the system include:
• Modified DSLR camera (full-spectrum) for near-infrared sensitivity
• Controlled power supply for forward-bias excitation of PV modules
• Stationary imaging setup for stable long-exposure capture
• Optical filtering to suppress visible light and isolate EL emission wavelengths
The system was designed to provide a cost-effective alternative to industrial-grade EL imaging solutions while maintaining sufficient sensitivity for defect detection.
Figure: ELimaging setup including camera system, controlled excitation, and experimental configuration.
Synchronized Image Acquisition & Signal Enhancement
A key challenge in EL imaging is the extremely low signal-to-noise ratio (SNR), particularly when using low-cost sensors and operating outside controlled environments. To address this, a synchronized acquisition and signal enhancement pipeline was developed.
The acquisition process includes:
• Controlled ON/OFF excitation cycles of the PV module using external triggering
• Capture of multiple EL frames during the excitation phase
• Acquisition of background (no excitation) frames to model ambient noise
• Multi-frame averaging to enhance signal strength
• Background subtraction to suppress static and environmental noise
This approach significantly improves the visibility of EL emission patterns and enables reliable defect detection even under suboptimal conditions.
Figure: EL image enhancement pipeline showing raw capture, averaged signal, and background-subtracted result.
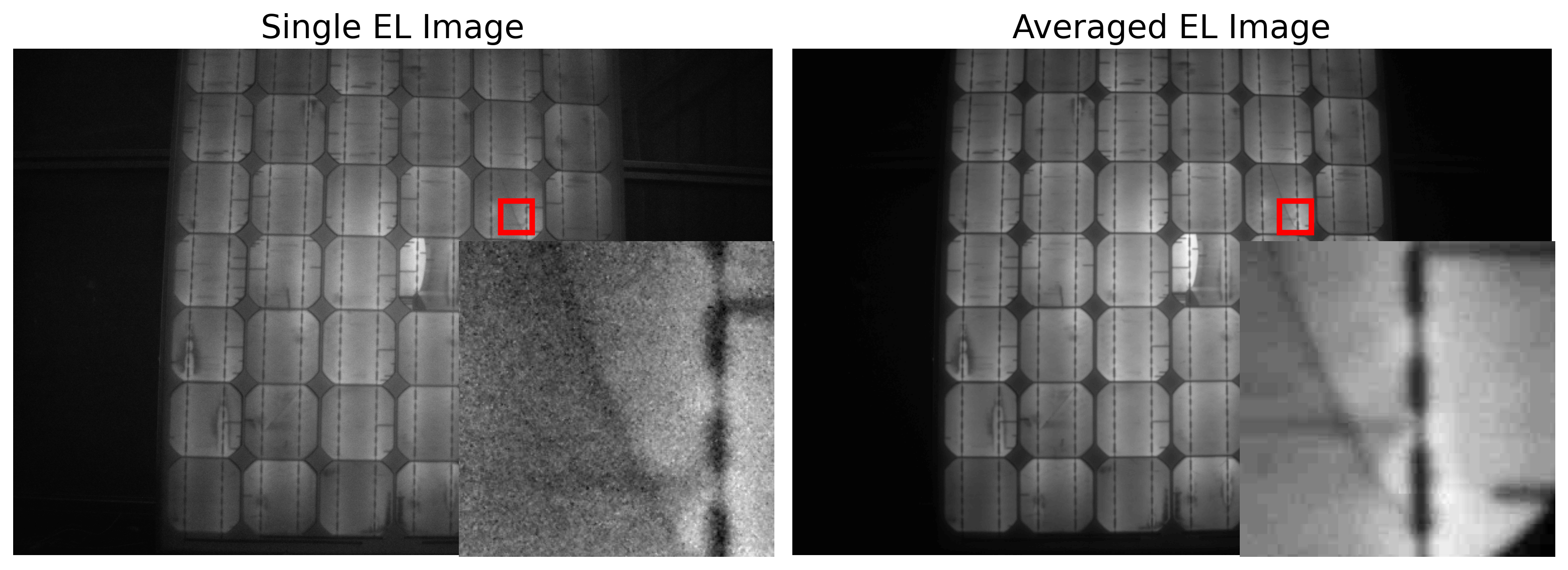
Figure: Model interpretability using Grad-CAM highlighting defect-relevant regions in EL images.
Extending EL imaging to outdoor environments introduces additional complexities due to ambient illumination and environmental variability. The system was evaluated under different conditions to understand the impact of:
• Irradiance levels and ambient light interference
• Optical filtering strategies (long-pass and short-pass filters)
• Camera positioning, distance, and angle
• Sensor limitations and exposure constraints
Outdoor experiments revealed challenges such as signal saturation and reduced contrast, particularly under high irradiance conditions. Strategies such as low-light acquisition timing and filtering were explored to mitigate these effects.

Figure: Outdoor EL imaging experiments under varying environmental and irradiance conditions.
The EL-based inspection system addresses several critical challenges:
• Capturing extremely low-intensity EL signals using low-cost imaging hardware
• Reducing noise and improving SNR through synchronized acquisition and processing
• Handling domain shifts between controlled datasets and field-acquired data
• Detecting subtle defects with minimal visual contrast
• Extending EL imaging capabilities from laboratory to outdoor environments
These contributions enable practical, scalable defect diagnostics for photovoltaic systems beyond controlled laboratory settings.
AI & Domain Adaptation Pipeline
To enable robust analysis across diverse imaging conditions and sensing modalities, a unified AI pipeline was developed for EL data. A key challenge addressed in this work is the domain shift between controlled datasets and real-world data, arising from differences in sensors, environmental conditions, and imaging setups.
The pipeline leverages transfer learning and unsupervised domain adaptation (UDA) techniques to improve generalization across domains without requiring extensive labeled data from the target environment.
The AI framework integrates multiple techniques to enhance robustness and adaptability:
• Transfer learning using pretrained convolutional neural networks (
• Feature distribution alignment across domains
• Reduce low-frequency domain differences
• Attention mechanisms to focus on defect-relevant regions and suppress background noise
• Hybrid approaches combining spatial and feature-level alignment
These methods enable the model to learn domain-invariant representations, improving performance when applied to unseen real-world data.
To validate model behavior and ensure reliability, interpretability techniques were integrated into the pipeline. This provides insights into model decision-making and guide further improvements in both model design and data acquisition.
System Design & Real-World Deployment
A key focus of this research is the development of inspection systems that operate effectively under real-world constraints. Unlike controlled laboratory setups, field deployment introduces variability in environmental conditions, hardware limitations, and operational challenges.
The system was designed as an end-to-end pipeline integrating sensing, data acquisition, processing, and AI-based analysis, ensuring practical usability in real-world PV installations.
Design Considerations
The following factors were considered in system development:
• Imaging constraints: low SNR in EL imaging and variable lighting in aerial imaging
• Hardware limitations: sensor sensitivity, exposure constraints, and processing capability
• Environmental variability: irradiance, temperature, and weather conditions
• Operational challenges: UAV stability, RF interference, and data acquisition consistency
Design decisions were made to balance performance, cost, and deployability.
Optics & Environmental Effects
Special attention was given to optical and environmental factors affecting imaging performance:
• Use of long-pass and short-pass filters to isolate relevant wavelength ranges
• Analysis of irradiance effects on EL signal visibility
• Optimization of camera positioning, distance, and viewing angle
• Evaluation of sensor performance under different lighting conditions
These considerations are critical for ensuring reliable data acquisition across different scenarios.
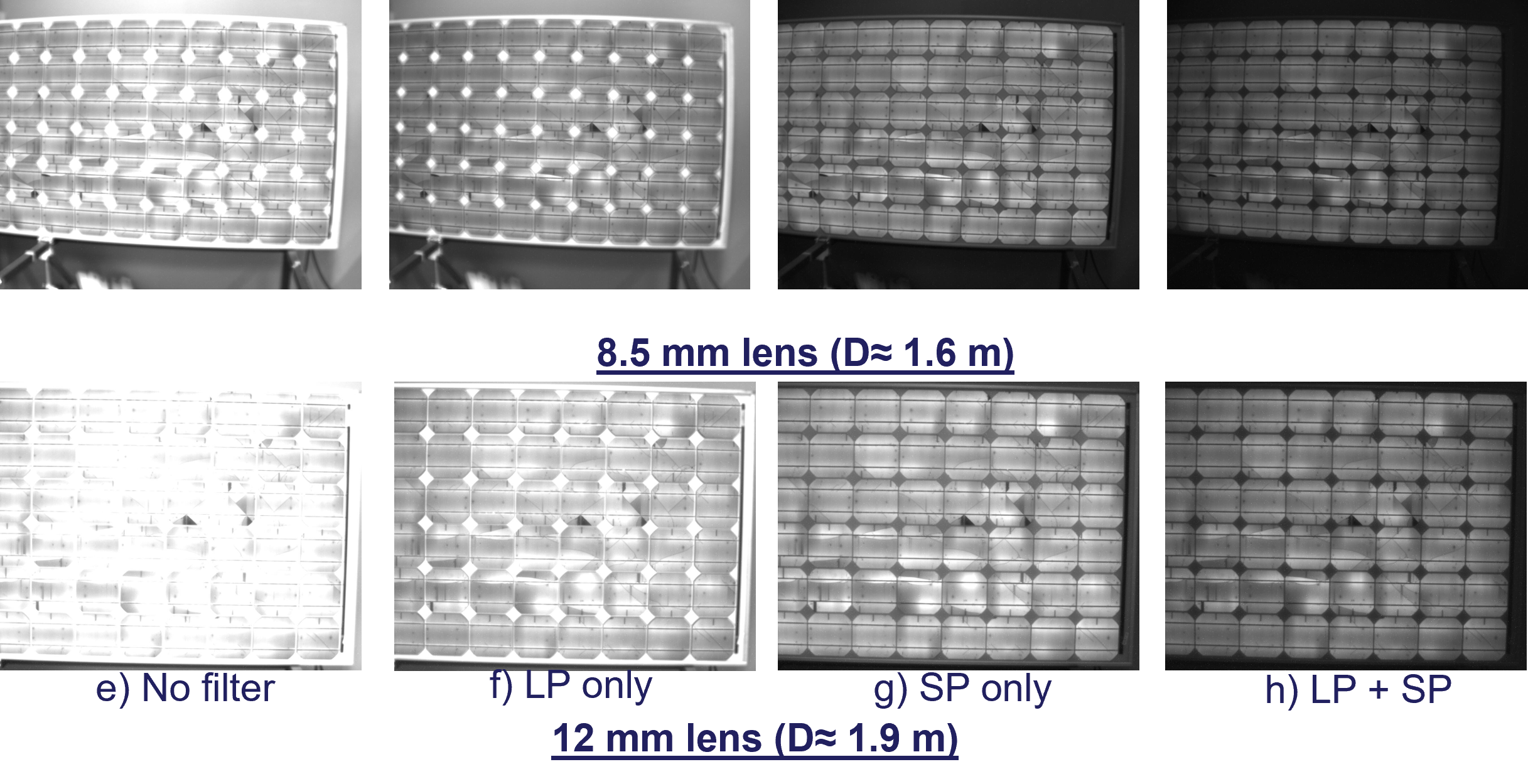
Figure: Optical configurations and experimental setups used for evaluating imaging performance under varying conditions.
Closing Statement
This work demonstrates a complete, multi-modal inspection framework for photovoltaic systems, integrating hardware design, signal processing, and AI-based analysis. By addressing real-world constraints such as low signal quality, environmental variability, and domain shift, the system provides a scalable and practical solution for intelligent solar PV monitoring.